精品课程网站建设 公司大连网站建设平台
【架构图】


【ipconfig/all】
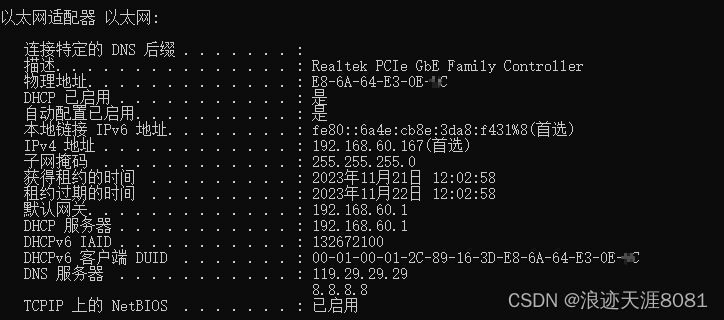
MAC地址:作用于本地网络,数据包发送到本地交换机或路由器后经判断目的地址是本地网络地址会转发给当前MAC地址对应的网线端口。
IP地址:供路由器寻址,会跟子网掩码进行运算,属于同一网络会转发给响应的网线端口,否则转发至下一跳路由设备
【架构图】
【ipconfig/all】
MAC地址:作用于本地网络,数据包发送到本地交换机或路由器后经判断目的地址是本地网络地址会转发给当前MAC地址对应的网线端口。
IP地址:供路由器寻址,会跟子网掩码进行运算,属于同一网络会转发给响应的网线端口,否则转发至下一跳路由设备