西安保洁公司网站建设app应用公司
- 时间分辨率:日
- 空间分辨率:1km - 10km
- 共享方式:开放获取
- 数据大小:15.36 GB
- 数据时间范围:2008-01-01 — 2023-12-31
- 元数据更新时间:2024-08-19
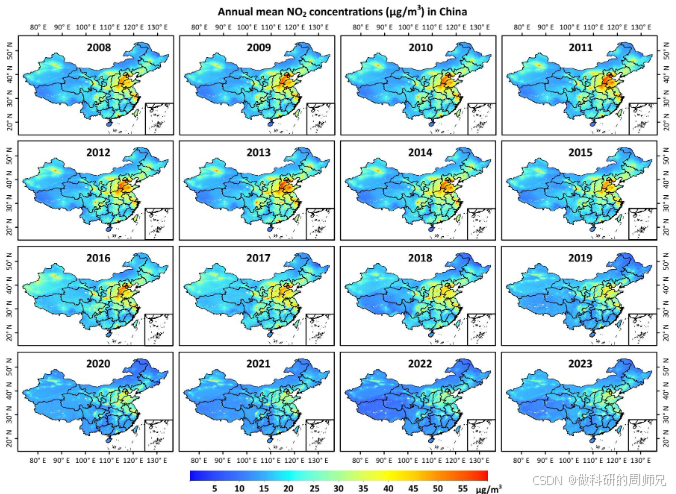
数据集摘要
ChinaHighNO2数据集是中国高分辨率高质量近地表空气污染物数据集(ChinaHighAirPollutants, CHAP)中地面NO2数据集。该数据集利用人工智能技术,考虑了空气污染的时空异质特性,从大数据(如地基观测、卫星遥感产品、大气再分析和模式模拟资料等)中生产得到2008年至今全国无缝隙地面NO2数据,主要范围为整个中国地区,空间分辨率2019年之前为10 km,2019年之后为1 km,10公里数据十折交叉验证决定系数R2为0.84,均方根误差RMSE为7.99 µg/m3;1公里数据十折交叉验证决定系数R2为0.93,均方根误差RMSE为4.89 µg/m3,时间分辨率为日、月、年,单位为µg/m3。注意:该数据集持续更新,如需要更多数据,请发邮件联系作者(weijing_rs@163.com; weijing@umd.edu)。 数据文件中包含NC转GeoTiff的四种代码(Python、Matlab、IDL和R语言)nc2geotiff codes。
数据文件命名方式和使用方法
文件命名:该数据以NetCDF文件格式存储,文件的名称为CHAP_NO2_ab_yyyymmdd_V1.nc,其中a表示时间分辨率(D表示日数据,M表示月数据,Y表示年数据),b表示空间分辨率(1K表示1km),yyyy代表年,mm表示月,dd表示日。数据读取方式:可用Python、Matlab、IDL等编程实现文件从nc到tif的转换。数据坐标系为WGS-1984,背景值为65535。
本数据要求的引用方式数据引用必读
数据的引用
韦晶, 李占清. (2023). 中国高分辨率高质量地面NO2数据集(2008-2023). 国家青藏高原科学数据中心. https://doi.org/10.5281/zenodo.4571660.
Wei, J., Li, Z. (2023). ChinaHighNO2: High-resolution and High-quality Ground-level NO2 Dataset for China (2008-2023). National Tibetan Plateau / Third Pole Environment Data Center. https://doi.org/10.5281/zenodo.4571660.
(下载引用: RIS格式 RIS英文格式 Bibtex格式 Bibtex英文格式 )
文章的引用
1、Wei, J., Liu, S., Li, Z., Liu, C., Qin, K., Liu, X., Pinker, R., Dickerson, R., Lin, J., Boersma, K., Sun, L., Li, R., Xue, W., Cui, Y., Zhang, C., & Wang, J. (2022). Ground-level NO2 surveillance from space across China for high resolution using interpretable spatiotemporally weighted artificial intelligence. Environmental Science & Technology, 56(14), 9988–9998. https://doi.org/10.1021/acs.est.2c03834 ( 查看 下载 Bibtex格式 )
2、Wei, J., Li, Z., Wang, J., Li, C., Gupta, P., & Cribb, M. (2023). Ground-level gaseous pollutants (NO2, SO2, and CO) in China: daily seamless mapping and spatiotemporal variations. Atmospheric Chemistry and Physics, 23, 1511–1532. https://doi.org/10.5194/acp-23-1511-2023 ( 查看 下载 Bibtex格式 )